While I qualified a long time ago on the M9, I never really learned to be a good shot. Now, I’m trying to learn to shoot well and wanted to automatically score my targets, keep the data, and get better.
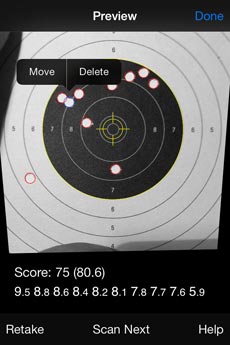
There are apps to do this, but none of them did what I wanted. One app by Thomas Gabrowski and Justa Mili works off a photo of the target to automatically calculate the score. They also have the capability to analyze shooting groups with Windage, Elevation, Mean Radius and Extreme Spread. They have capabilities to keep track of your previous shooting sessions and monitor progress. The App costs $17.
Developing my own costs my time, but gives me flexibility to work with my targets and my system. It’s also a thing I do: grab challenges that will teach me something. It’s served me well and Matlab makes this all accessible and fun. The other thing is that apps never work exactly right. What if I want the raw data so I can calculate if I’m aiming high or low over time? All this code is on github at https://github.com/tbbooher/automatic_target_scoring.
I told my children that two key skills every digital citizen needs are the ability to process text and images. By processing text, I’m able to tell any story from any reports in digital form. This is often bank statements, hotel stays, fitness stuff or uber rides. By processing images, I’m able to understand and report on things that are happening around me.
In looking around, I found this thesis filled with some good ideas. I reached out to the author and discussed the merits of edge detection vs template matching. He didn’t have his code available. There were several papers but none were really that helpful. It was easier to start building than to spend a lot of time reading other’s approaches.
I knew there would be three steps to this: (1) registering all images to the standard, fixed, image for consistent distance, (2) finding the bullet holes/center and (3) measuring the distances from the center each hole.
Image Registration
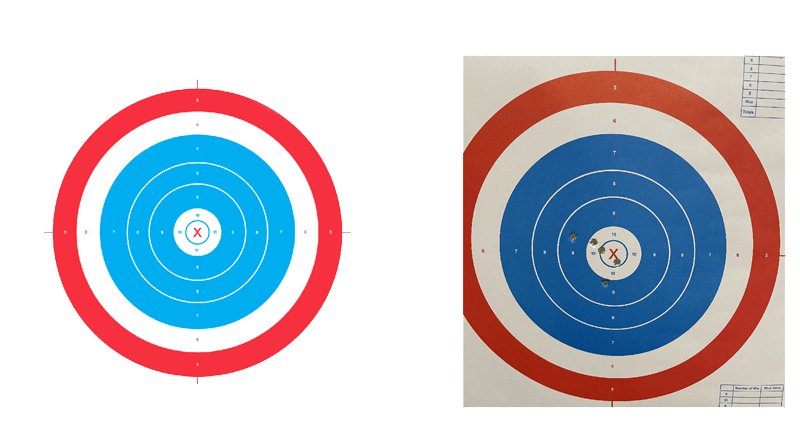
This was harder than I thought since most registration is for two similar images. I was used to the ease of Photoshop for rapid registration. It turns out it is a hard problem to register images of different pictures of what are really different scenes, even though the structure is common. Most image registration problems are pictures of the same scene that have been taken at different angles or distances. The picture below makes this clear:
I found two approaches that worked for image registration. The first approach was to extract the red circle and then make the circles match. Here I had to calculate and align the centers, and rescale one image to the size of the other. Color thresholding and imfindcircle were quite useful.
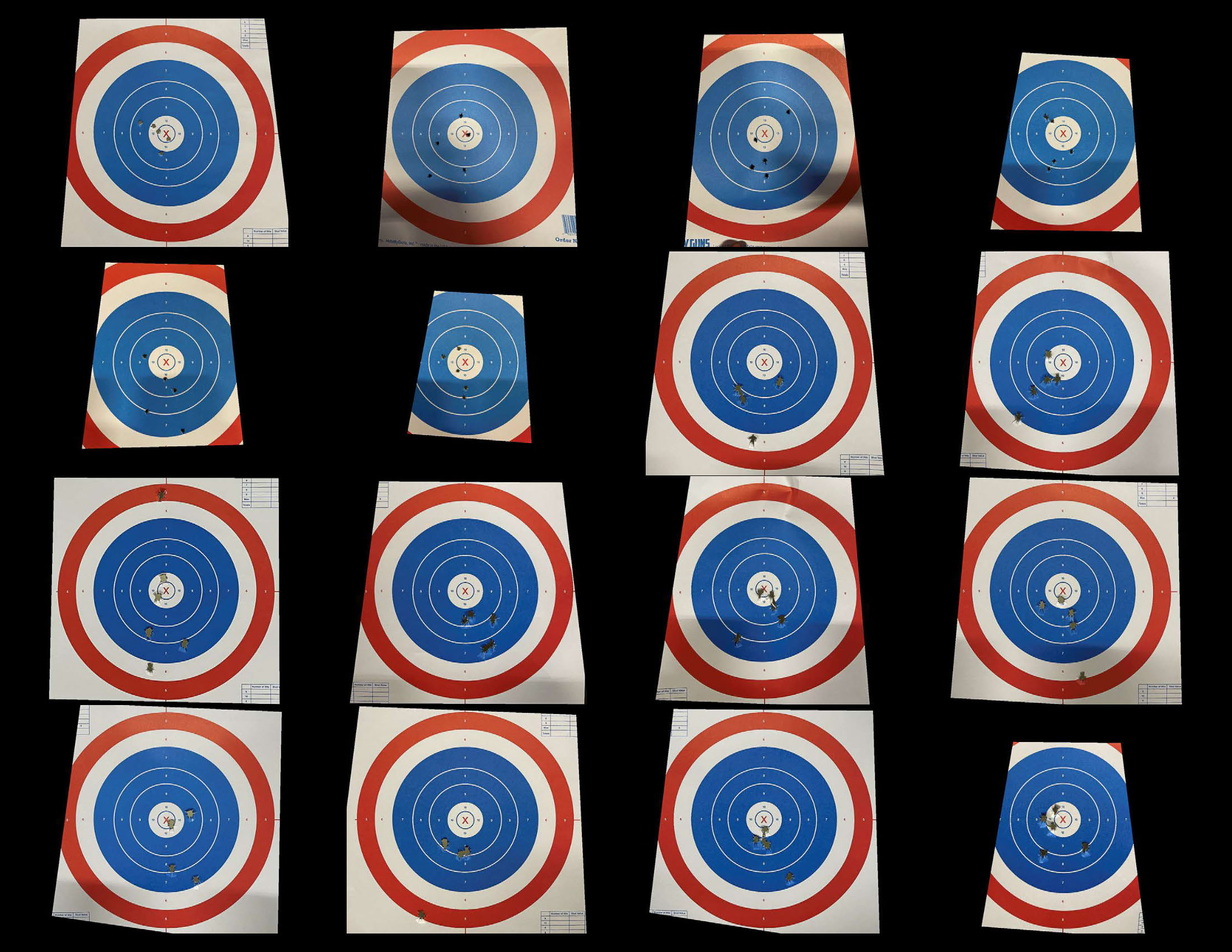
For the more general case, I had to use fitgeotrans which takes the pairs of control points, movingPoints and fixedPoints, and uses them to infer the geometric transformation. It does this by taking the pairs of control points, movingPoints and fixedPoints, and uses them to infer the geometric transformation. After doing this I had a set of images that were all the same size, and all in the same orientation — with bullet holes.
Finding the bullet holes
I was able to use this matlab post to learn that I could sample some colors in photoshop, convert the image to HSV and find shades of gray using some code from Theodoros Giannakopoulos.
The next thing I had to do was create the ability to find the center. I did this by recognizing that the center X is red and pretty distinctive — ideal for template matching using normalized cross-correlation matlab has a great description of how this works here. With this accomplished, I can find the center in a few lines, by going off this template:

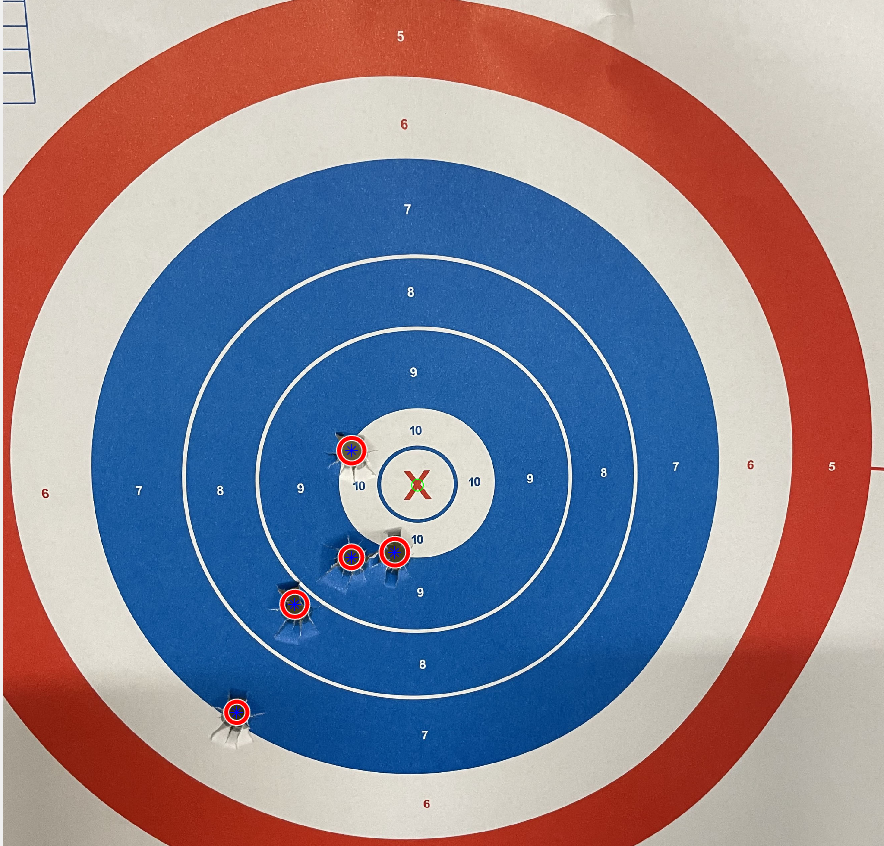
All together, I’m able to compute the measurements to make a picture like this (note the green circle in the middle on the X):
With the image registered, the center defined and all holes discovered, I could easily calculate a score of a mean distance to the bullseye.
Problems
The problem was that I couldn’t get good consistency. The shadows were a problem on some images, on others, shots very close to one another caused confusion. It turned out that I was really good at quickly seeing the holes, better than a template matching problem. Note that when I saved the image, I updated a xls file and saved the scores as EXIF data so the image had the exact locations of the holes that I could pull out later if needed. The code below works awesome and is ideal for my solution. Best of all, I learned a lot about how to manipulate and extract data from images.
Results
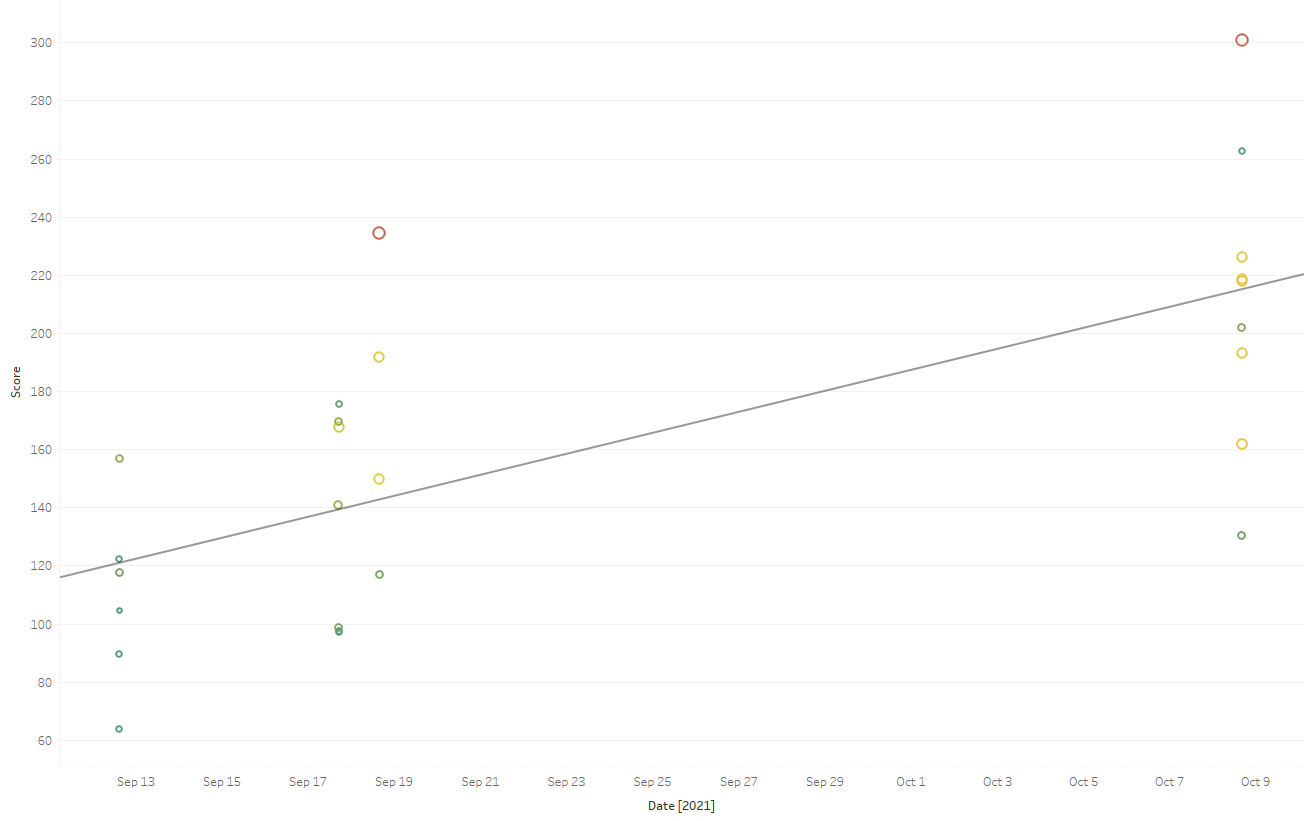
So, is my shooting getting better? Not yet. In the plot below you can see my score is increasing, and the stDev of my shots is increasing as well. Now, the data aren’t uniform since I had the target at 5m and now have it at 6.5m on Oct 8. Sept 12 was with a suppressed 22 at 5m. Oct 8 was 9mm. Anyway, it’s better to know from data than to be guessing. I’m chalking this up to an improved technique that is taking some time to adjust to.
Leave a Reply